尽管机器人技术发展多年,但距离真正意义上的“智能”仍有明显差距。泛化能力弱、应用场景受限、商业化进程缓慢等问题,始终制约着整个行业的突破。即便在最新一代机器人身上,“摔跤”“反应迟缓”“判断失误”等基础性挑战依然常见。
深入分析发现,机器人的发展瓶颈已从硬件转向软件,最大的挑战仍然在于AI模型的突破。如果将机器人比作人类,硬件相当于发育完全的四肢,而 AI才是真正的“大脑”,数据则是学习资料,腾讯云存储所构建的Data Platform数据平台,则相当于支撑其全面成长的“大学教育体系”。
帕西尼感知科技,作为国内领先的高精度触觉感知与具身智能核心技术企业,其CTO张恒第在日前的采访中指出:收集包含视觉、关节角度、动作轨迹、语音,以及极为稀缺的触觉模态在内的人类与物理世界交互的全模态数据,是一个非常庞大且复杂的工程,多方对比后,帕西尼把自己所收集的这些训练机器人所必需的全模态数据,送进“腾讯云大学”。
机器人为何看着“笨”?
在今年4月的机器人马拉松大赛上,一台人形机器人缓慢前进,后面跟着几十位工程师,他们忙着调算法、换电池、抗干扰。即便如此,大多数机器人还是频繁摔跤,窘态百出。
这一现象背后,是早在20世纪80年代就由汉斯·莫拉维克等人提出的“莫拉维克悖论”:对人类而言困难的任务(如复杂运算),对机器反而容易;而人类轻松完成的动作(如感知与运动),对机器却异常艰难。
原因在于,前者对于机器来说,是做减法。大语言模型(LLM)等技术将人类上百万年积累的知识压缩到机器里,当你与 AI 聊天时,相当于你在与人类文明史对话。当你与AI比赛时,相当于你与更高维度的智力对抗。
而后者对于机器人来说,是做加法。以“拿杯子”这样的简单指令举例,机器人操作起来,要经历6个步骤、13个技术领域。
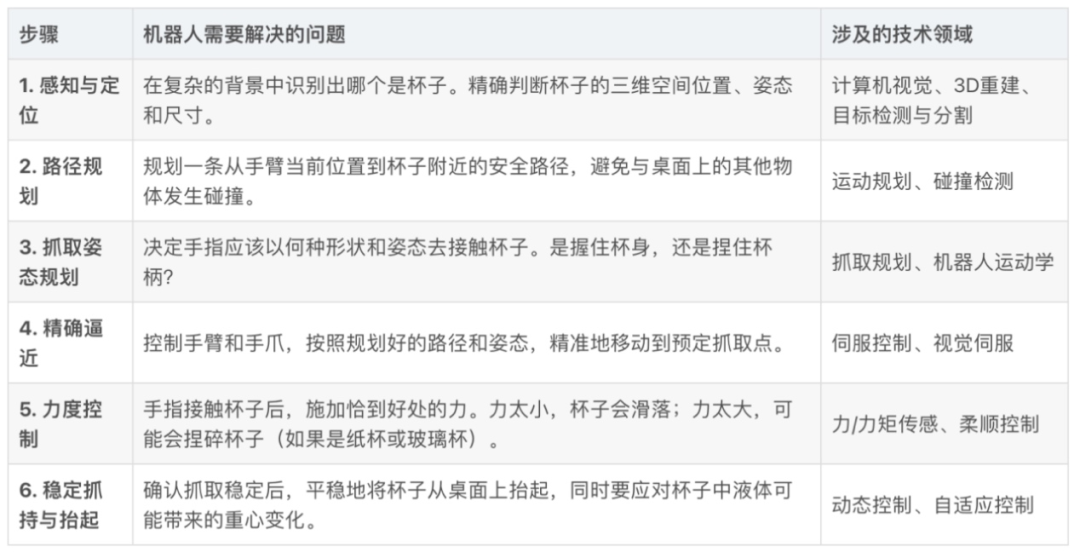
机器人对“拿杯子”动作的拆分
帕西尼CTO张恒第指出,人类执行的每一个动作,均涵盖触觉、视觉、关节角度、动作轨迹、语音等多维度信息。人类本可轻松完成的任务,对机器人来说却极为复杂。
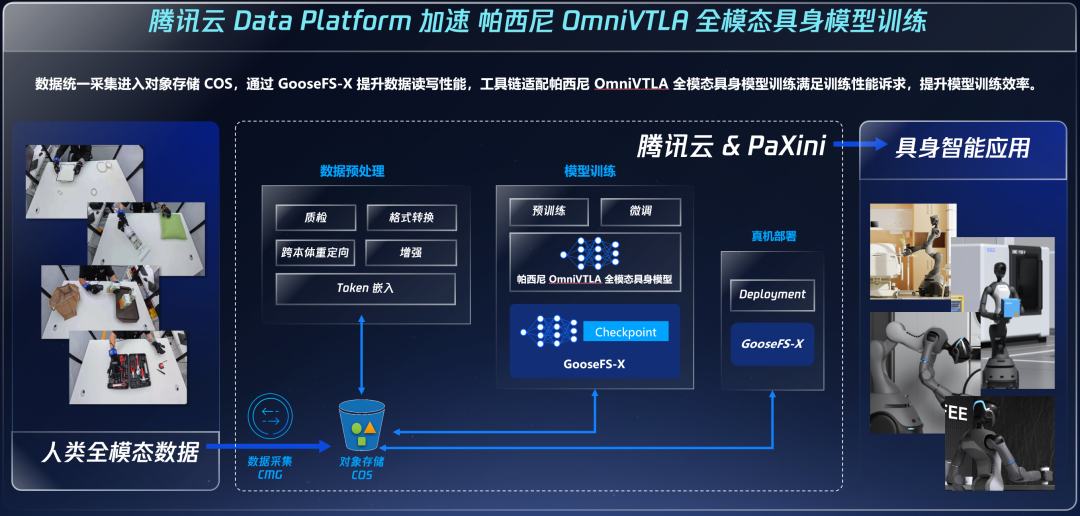
张恒第进一步强调:“机器人与物理世界的每一次交互都产生海量数据。在帕西尼超级数采工厂,单日数据量可达150TB,年数据规模达百PB级别,传统本地存储完全无法承载。”腾讯云存储Data Platform所支撑的采集数据上传、存储、训练环节,便成为海量全模态具身数据高效推进产业跃迁的关键。
机器人也需要“上大学”
为解决机器人学习难题,行业领先企业开始将机器人送入“大学”进行系统训练。与人类不同,机器人的学习通过“训练数据-植入数据”模式完成,腾讯云存储Data Platform数据平台正是这所“大学”的核心基础设施。
我们先来看一下为何过去机器人学习不好:
● 一场数据饥荒。加州大学伯克利分校的机器人专家肯·戈德伯(Ken Goldberg)曾指出,人形机器人在技能获取上,与AI聊天机器人存在着天壤之别。其核心症结在于一场严重的“数据饥荒”,二者的差距为十万年。
● 泛化能力不足。机器人仅凭视觉信号难以获得现实世界的物理常识,这导致它们无法处理未知场景,无法进行常识推理,更无法在失败后进行基于理解的反思与调整。
● 一个模型学习了与任务无关的特征(如视角、背景)跟动作之间的虚假相关性,而非理解语言指令与目标之间的真正关系。
比如,你向小孩介绍一只猫,下次遇到其他品种的猫,他也会反应出来这是“猫”。但如果你喂养一个机器人,前期需要向他输入大量猫的照片、类型、特征,训练成百上千次后,机器人才会明白,什么样的物种,可以称为猫。
这期间,如果有一只猫长了斑点,机器人就有可能将“斑点”与“猫”联系起来,遇到带斑点的衣服时,机器人也可能认为这是一只猫。
在这个过程中,数据量级、质量、处理方式,都会对机器人的反应造成重要影响。
基于全球顶级的触觉感知技术,帕西尼自研“人因”具身智能数据采集体系,采用“多维触觉数据采集手套 PMEC”+“空间视觉矩阵”的方式,高效、高质地采集机器人所需的与物理世界交互的全维度数据,用以帮助整个行业加速实现智能泛化进程。帕西尼选择了腾讯云存储 DataPlatform 数据平台,张恒第介绍,他们看重腾讯云的点为:
一是海量弹性存储。腾讯云存储提供了海量、安全稳定、低成本的存储支持,满足具身智能行业对海量统一存储的要求。自动冷热数据分层,热数据极速响应,冷数据沉降至低成本COS对象存储。
二是模型训练加速。TB/s级吞吐与亚毫秒级访问延迟的数据处理流水线,消除GPU等计算资源的数据供给瓶颈,确保算力资源高饱和运转,提升大规模模型训练与推理效率。
三是智能化数据治理。提供全局元数据索引与语义检索能力,实现语音、视觉、传感流等异构数据的自动关联分析与血缘追溯,提升文件检索效率,为仿真决策提供高一致性训练样本,激活多模态数据协同价值。
“腾讯云的优势在于:可以将数据快速加载到分发系统里并调取数据。工具链完整,调取模型不必借助其他工具。即时反馈,看到模型需要修改处,帮助我们快速迭代。提供良好仿真环境,让我们在部署前就能在云上进行大量仿真验证。安全能力高,有效防止外部攻击。DataPlatform算力调度能力强,可以投放大量仿真任务。我们可以只用几行简单的命令,就能便捷地使用各种服务,非常方便。”张恒第说。
在腾讯云“大学”,数据被加工提练为可用“教材”,最后统一输出给机器人,让机器人突破本体限制,实现云上进化,正如人突破了肉身限制,实现认知升级。
从“硬件驱动”到“智能驱动”:机器人步入“智斗”时代
在机器人进化史上,“硬件先行”曾是行业共识,但如今形势已变。培养具备认知与决策能力的“机器人大脑”,不再只是技术趋势,更是产业发展的必然选择。
从历史维度看,缺乏软件支撑的机器人注定被淘汰。以日本本田公司开发的阿西莫(ASIMO)为例,这款曾集奔跑、踢球、倒咖啡等技能于一身的机器人,在诞生22年后黯然退场。其根本原因在于,阿西莫每个动作依赖三万行控制代码手动编写,无法适应AI驱动的新时代。相比之下,现代机器人通过 AI 训练,仅用几小时就能掌握后空翻、打太极等高难度动作,效率与灵活性形成鲜明对比。
帕西尼 CEO许晋诚指出,中国在机器人硬件制造上已位居全球第一梯队,但“成年人的身体不能配小孩的脑子”。仅靠硬件性能的堆砌,无法满足现代产业对柔性生产、个性化服务和快速适应的需求。
在这一背景下,“智斗”能力成为机器人的核心竞争力。
帕西尼CTO张恒第强调:“短期目标是持续迭代帕西尼包括传感器、灵巧手、人形机器人、数据采集系统等触觉产品矩阵的能力;长期目标是通过带有重要触觉模态的全链条具身智能核心技术,推动AI与物理世界的深度融合,加速具身智能在物理世界中的认知与操作能力进化。”在这一进程中,腾讯云提供的存储与算力支持成为关键基础设施。通过其高可用、高并发的数据处理能力,有望降低具身智能研发的门槛,加速“智能涌现”时刻的到来。
当前,机器人厂商正积极构建“数据飞轮”闭环——通过实际场景中的数据反馈持续优化模型,进而提升机器人的智能水平。帕西尼的TORA-ONE机器人已应用于医疗、物流、工业制造乃至地铁安检等多元场景,不同领域的数据特性与任务需求,进一步凸显了云端训练与迭代的重要性。

如今,在腾讯云存储构建的“大学”环境中,机器人正实现从单体智能到群体智能的跨越。当机器人从这所“大学”毕业之时,就是其真正融入人类生活、开启智能新纪元的开端。